
Une équipe de chercheurs de l’Université de Yale a récemment mis au point un système robotique capable de représenter, d’apprendre et de déduire les relations et les normes de propriété. Leur étude, pré-publiée sur arXiv, aborde certains des problèmes complexes associés à l’enseignement des normes sociales des robots et à la manière de s’y conformer.
À mesure que les robots deviennent plus répandus, il est important qu’ils soient capables de communiquer avec les humains de manière efficace et appropriée. Un aspect clé des interactions humaines est la compréhension et le comportement selon les normes sociales et morales, car cela favorise la coexistence positive avec les autres.
Les normes de propriété sont un ensemble de normes sociales qui aident à naviguer dans des environnements partagés de manière plus respectueuse envers les autres. Enseigner ces normes à des robots pourrait améliorer leurs interactions avec les humains, leur permettant de faire la distinction entre des outils non possédés et des outils possédés qui sont partagés temporairement avec eux.
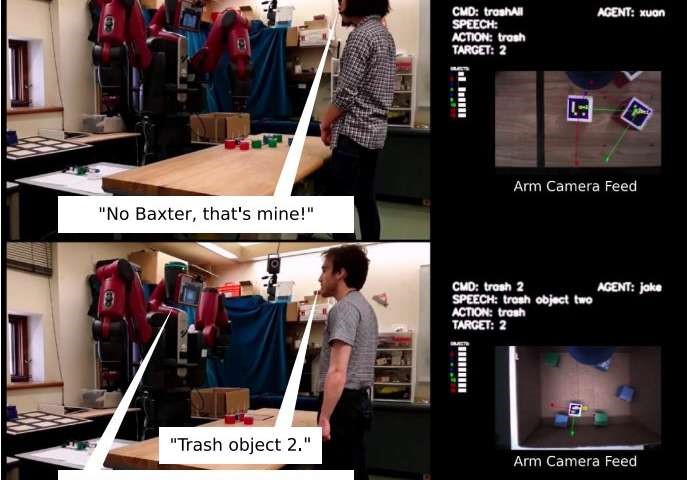
Apprentissage de la propriété via une interaction homme-robot. En haut: le robot est interrompu verbalement par Xuan lorsqu’il a appris les relations de propriété et les autorisations d’action en interagissant avec Xuan, le robot refuse la demande de Jake de jeter l’objet 2.
« Mon laboratoire de recherche se concentre sur la construction de robots avec lesquels il est facile d’interagir » a déclaré Brian Scassellati, l’un des chercheurs ayant mené l’étude à TechXplore. « Une partie de ce travail consiste à examiner comment nous pouvons enseigner aux machines les concepts sociaux courants, des choses qui sont essentielles pour nous en tant qu’êtres humains, mais qui ne sont pas toujours les sujets qui attirent le plus l’attention. La compréhension de la propriété, des us et usages ne retiennent pas beaucoup l’attention des chercheurs alors qu’ils seront critiques pour le fonctionnement des machines dans nos maisons, nos écoles et nos bureaux ».
Dans l’approche mise au point par Brian Scassellati, Xuan Tan et Jake Brawer, la propriété est représentée sous la forme d’un graphique des relations probabilistes entre les objets et leurs propriétaires. Ceci est combiné à une base de données de normes basées sur les prédicats, qui contraint les actions que le robot est autorisé à effectuer sur des objets.
« L’un des défis de ce travail est de faire converger des règles explicites (par exemple, » ne prenez pas mes outils « ) et des règles issues de l’expérience » a déclaré Scassellati. « Combiner ces deux types d’apprentissage peut être facile pour les humains, mais est beaucoup plus difficile pour les robots ».
Le système mis au point par les chercheurs combine un nouvel algorithme d’apprentissage de normes incrémentiel capable à la fois d’apprentissage unique et d’induction à partir d’exemples, avec une inférence bayésienne des relations de propriété en réponse à des violations apparentes des règles et une prédiction basée sur la perception des propriétaires potentiels d’un objet. Ensemble, ces composants permettent au système d’apprendre les normes de propriété et les relations applicables dans diverses situations.
« La clé du travail effectué par Xuan et Jake a été de combiner deux types de représentation d’apprentissage automatique, l’un tirant de ces règles symboliques explicites et l’autre tirant les enseignements de l’expérience », a expliqué Scassellati. « Faire en sorte que ces deux systèmes fonctionnent ensemble est à la fois ce qui rend cette tâche difficile et, au bout du compte, ce qui en fait la réussite ».
Les chercheurs ont évalué les performances de leur système robotique dans une série d’expériences simulées et réelles. Ils ont constaté qu’il pouvait effectivement mener à bien des tâches de manipulation d’objets nécessitant le respect de diverses normes de propriété , avec une compétence et une souplesse remarquables.
L’étude réalisée par Scassellati et ses collègues offre un exemple de la façon dont les robots peuvent être formés pour déduire et respecter les normes sociales. Des recherches ultérieures pourraient appliquer des concepts similaires à d’autres capacités liées aux usages et traiter des situations complexes dans lesquelles usages et objectifs différents sont en conflit.
« Nous continuons à chercher des moyens de construire des robots qui interagissent plus naturellement avec les gens, et cette étude se concentre uniquement sur un aspect de ce travail » a déclaré Scassellati.
Source : https://techxplore.com/news/2018-12-robot-capable-ownership-norms.html